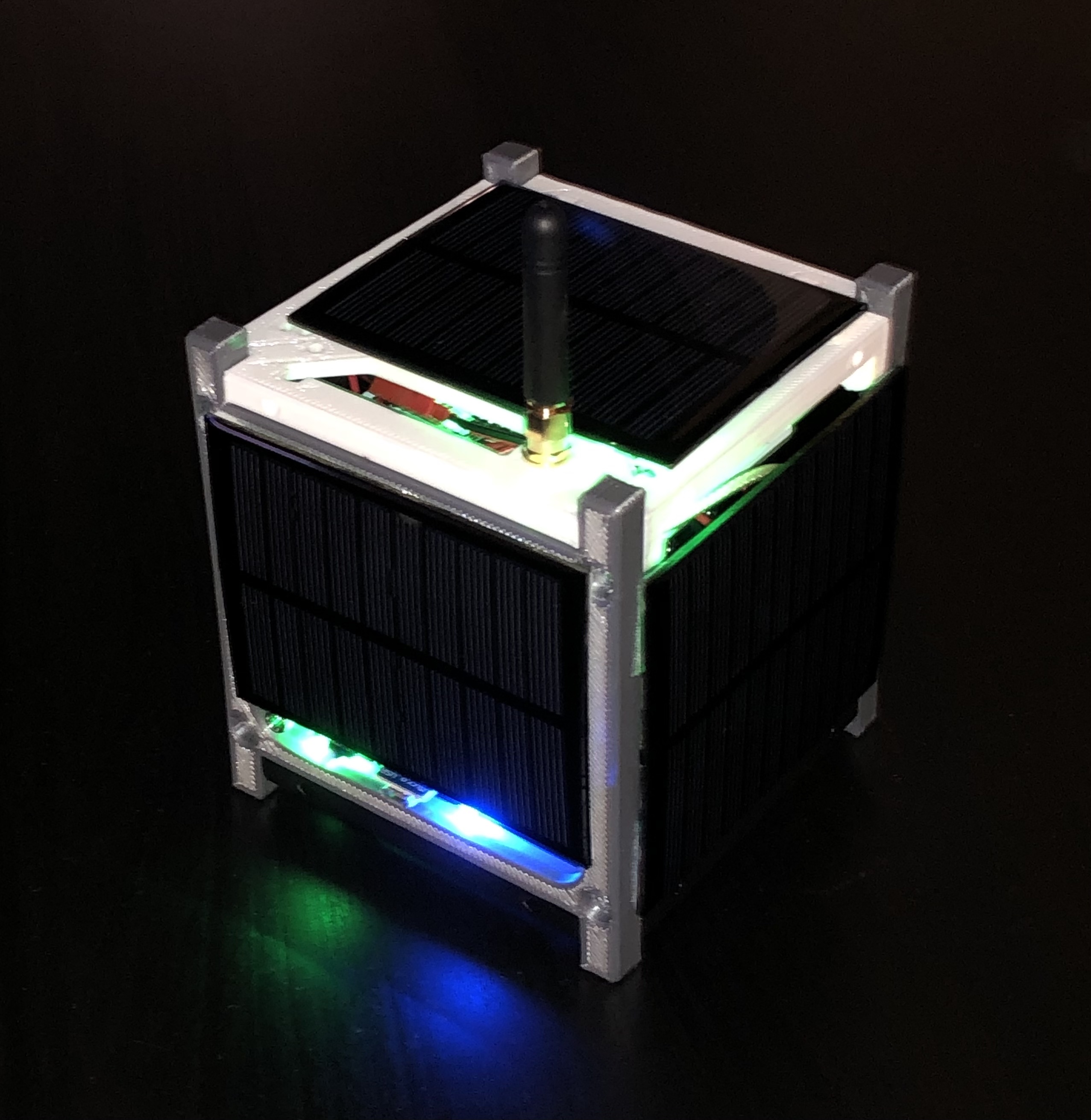
Le CubeSatSim est un émulateur de satellite à faible coût qui fonctionne sur des panneaux solaires et des batteries, transmet la télémétrie radio UHF, a un cadre imprimé en 3D et peut être étendu par des capteurs et des modules supplémentaires. Ce projet est parrainé par la société à but non lucratif Radio Amateur Satellite Corporation, AMSAT®.
TinyGS est un réseau ouvert de stations au sol réparties dans le monde entier pour recevoir et exploiter des satellites LoRa, des sondes météorologiques et d'autres objets volants, en utilisant des modules bon marché et polyvalents.
Ce projet est basé sur des cartes ESP32 et est actuellement compatible avec les modules LoRa sx126x et sx127x, mais nous prévoyons de prendre en charge plus de modules radio à l'avenir.
Actuellement, nous soutenons officiellement les cartes LoRa éprouvées suivantes:
TTGO LoRa32 V2 (Manually swapped SX1267 to SX1278)
T-BEAM + OLED (433MHz & 868-915MHz versions)
T-BEAM V1.0 + OLED
FOSSA 1W Ground Station (433MHz & 868-915MHz versions)
ESP32 dev board + SX126X with crystal (Custom build, OLED optional)
ESP32 dev board + SX126X with TCXO (Custom build, OLED optional)
ESP32 dev board + SX127X (Custom build, OLED optional)
Cependant, toute carte ESP32 avec module sx126x ou sx127x peut être configurée à l'aide de modèles.
Histoire
Initialement, TinyGS est né sous le nom d'ESP32 Fossa Groundstation, il a été développé comme un projet «week-end» pour le satellite FossaSAT-1 LoRa. Nous sommes passionnés par l'espace et avons créé ce projet pour pouvoir suivre et utiliser les satellites et pour apprendre et expérimenter la radio. Actuellement, le réseau est ouvert à n'importe quel satellite LoRa et nous prenons également en charge d'autres objets volants qui ont une modulation radio compatible avec notre matériel tels que FSK, GFSK, MSK, GMSK, LoRa et OOK. Et le projet a été renommé TinyGS.
Même si nous n'avons aucune relation avec l'équipe Fossa, ils ont inspiré ce projet et nous sommes ravis de soutenir leurs nouveaux satellites lancés dans notre réseau.
Voici les moments les plus importants du projet:
28 novembre 2019 Naissance du projet ESP32-OLED-Fossa-GroundStation. 6 décembre 2019 FossaSAT-1 déployé avec une fusée Electron par Rocket Lab. 10 décembre 2019 Le GS de YL3CT reçoit le premier paquet LoRa de FossaSAT-1 28 sept.2020 Le satellite Norby LoRa 6U est déployé avec un lanceur Soyouz-2-1b 11 octobre 2020 La GS de KA9ETC reçoit le premier paquet LoRa de Norby 24 janvier 2021 3x V-R3x assis déployés avec un Falcon-9 25 janvier 2021 Les GS de KA9ETC reçoivent le premier paquet LoRa de V-R3x 14 février 2021 Nouveau nom et site Web tinyGS.com avec un nouveau micrologiciel bêta. 28 février 2021 Premier paquet reçu de SD SAT par PA3ARK. 20 mars 2021 Premier message de relais LoRa entre deux stations tinyGS de K4KDR à N6RFM utilisant SD SAT.
L'atterrisseur transportant un rover de la mission Tianwen-1 a atterri dans la partie sud d'Utopia Planitia, une vaste plaine de l'hémisphère nord de Mars, le 15 mai, devenant la première sonde du pays à atterrir sur une planète autre que la Terre.
La première photographie, une image en noir et blanc, a été prise par une caméra d'évitement d'obstacles installée devant le rover Mars. L'image montre qu'une rampe sur l'atterrisseur a été étendue à la surface de Mars. Le terrain de la direction avant du rover est clairement visible sur l'image, et l'horizon de Mars semble incurvé en raison de l'objectif grand angle.
La deuxième image, une photo couleur, a été prise par la caméra de navigation installée à l'arrière du rover. Les panneaux solaires et l'antenne du rover sont vus dépliés, et le sol rouge et les roches sur la surface martienne sont clairement visibles sur l'image.
La sonde a également renvoyé une vidéo prise par une caméra sur l'orbiteur, montrant comment l'atterrisseur et le rover se sont séparés de l'orbiteur lors de l'atterrissage.
Le 4 juillet 1976, alors que les Américains célébraient le bicentenaire du pays avec de la bière et des fusées en bouteille, un signal fort commença à perturber les signaux à ondes courtes, maritimes, aéronautiques et de télécommunications dans le monde entier. Le signal était un tapotement rapide de 10 Hz qui ressemblait à un pic ou à un hélicoptère thup-thupping sur le toit. Il avait une large bande passante de 40 kHz et dépassait parfois 10 MW.
C'était pendant la guerre froide, et beaucoup de gens se sont précipités à la conclusion qu'il s'agissait d'une sorte de système de contrôle de l'esprit soviétique ou d'expérience de contrôle du temps. Mais les opérateurs de radio amateur ont retracé le mystérieux signal jusqu'à une antenne radar au-dessus de l'horizon près de Tchernobyl, en Ukraine (qui faisait alors partie de l'URSS) et l'ont nommé le pic russe. Voici un extrait du son.
Le signal de Woodpecker à sauts de fréquence était si fort qu'il rendait la communication impossible sur certains canaux et pouvait même être entendu sur les lignes téléphoniques lorsque les conditions étaient réunies. Plusieurs pays ont déposé des plaintes officielles auprès de l'URSS par le biais de l'ONU, mais rien n'a empêché le pic russe. La Russie ne reconnaîtrait même pas l’existence du signal, qui a depuis été attribuée à une immense structure d’antenne de près d’un kilomètre de long et de 490 pieds, légèrement plus haute que la Grande Pyramide de Gizeh.
Cette imposante structure en acier se dresse dans la forêt irradiée près de Pripyat, une ville idyllique fondée en 1970 pour abriter les travailleurs de la centrale nucléaire de Tchernobyl. Sur la photo ci-dessus, l'émetteur, également connu sous le nom de Duga-1, Tchernobyl-2 ou Duga-3, selon la personne à qui vous le demandez. Située à 30 miles au nord-est de Tchernobyl, sur les anciennes cartes soviétiques, la zone est simplement appelée Camp Scout. Aujourd'hui, tout est dans la zone d'exclusion de Tchernobyl.
C’était un tel secret que le gouvernement a nié son existence, mais a été entendu partout dans le monde. À quoi servait cette installation gigantesque?
Alerte précoce à distance
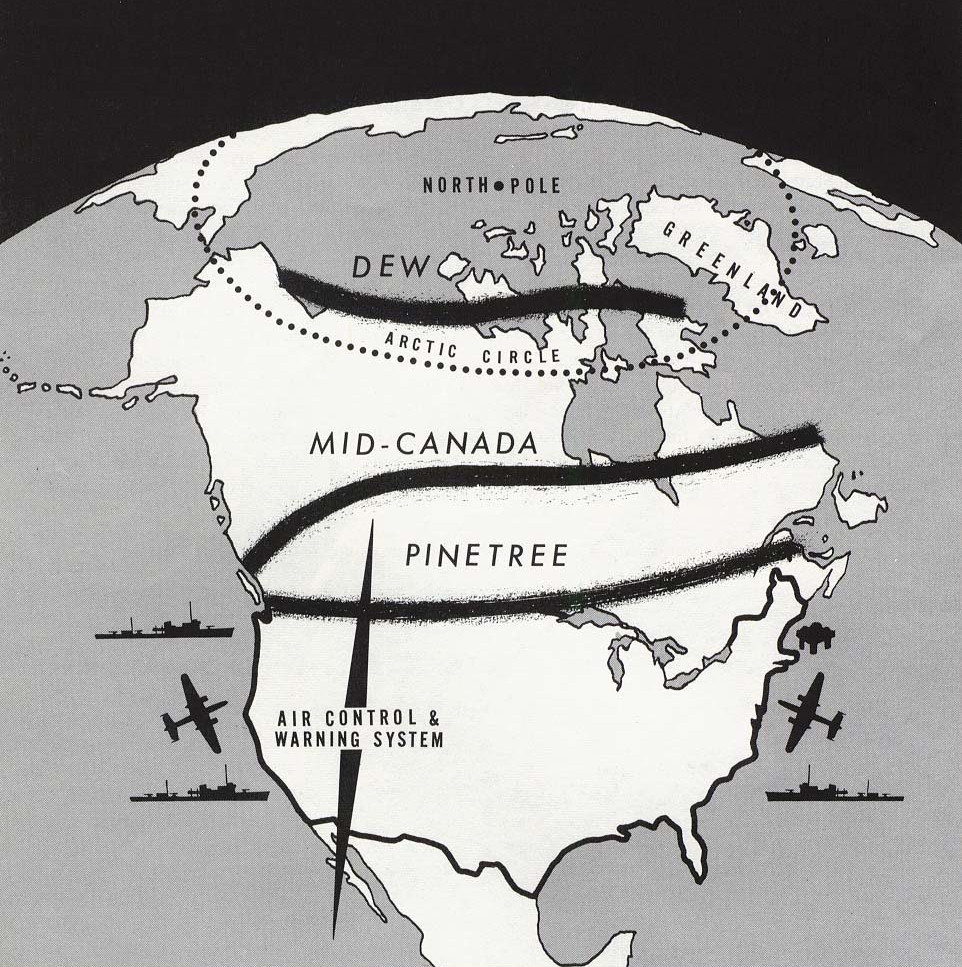
Le radar Duga était l'une des deux paires d'émetteur / récepteur construites en réponse à la Distant Early Warning Line (DEW Line), une poignée d'antennes construites au-dessus du cercle polaire arctique dans le cadre d'un effort conjoint entre les États-Unis et le Canada. Comme tout radar à horizon, la théorie derrière le système russe était que Moscou aurait environ 25 minutes pour répondre aux ICBM en nature, plutôt que de seulement 10 minutes environ pour esquiver et couvrir et embrasser le monde au revoir. Pour avoir une meilleure idée de l’ampleur de cette chose, regardez la brève visite de Tom Scott dans la vidéo intégrée ci-dessous. Les lignes radar DEW, Mid-Canada et Pinetree. Image via Wikipedia
Le radar au-dessus de l'horizon s'appuie sur un phénomène similaire qui offre une si grande portée pour la radio amateur - les signaux rebondissent sur l'ionosphère et sont ainsi capables de surmonter la courbure de la Terre, ce qui lui permet de détecter les lancements beaucoup plus tôt que le radar au sol standard. pouvez.
Dans le documentaire de 2015 The Russian Woodpecker, une équipe de tournage dirigée par un artiste de Kiev tente de percer les mystères de l'antenne. Il pense que l'incident nucléaire de Tchernobyl a été orchestré pour détourner l'attention de la structure, qui devait faire l'objet d'une inspection à venir qu'elle n'allait jamais réussir.
Selon le documentaire, l'antenne Duga coûtait deux fois plus que l'usine de Tchernobyl elle-même - environ 7 milliards de roubles. Mettre ce coût dans un contexte historique est délicat. En utilisant les taux de change déclarés par le Trésor au 30 juin 1976, nous constatons que le taux de change à l'époque était de 0,7550 roubles pour des dollars. Cela place le coût de 1976 à environ 9,27 milliards de dollars. L’inflation a ajusté la valeur de 43,16 milliards de dollars en 2021 - une somme ahurissante qui nous amène à remettre en question l’évaluation des coûts du documentaire (et l’exactitude de notre propre processus de conversion).
Certaines sources affirment que le système radar n'a jamais fonctionné. D'autres sources affirment que c'est le cas et qu'elles ont pu détecter chaque lancement de Shuttle avec. Et quand on a signalé que le Woodpecker interférait avec les signaux SOS russes, ils ont modifié la fréquence. Mais après avoir fait cela, il a cessé de fonctionner à cause des interférences des aurores boréales.
Faire des Moscou Mufflers
Finalement, les entreprises et les particuliers ont construit des circuits de suppression pour désactiver les écoutes incessantes. Les circuits de suppression d'interférences classiques fonctionnent en recherchant une durée d'impulsion courte avec un temps de montée rapide et génèrent un signal pour fermer une porte dans le chemin du signal. Mais ceux-ci seraient inutiles pour noyer le pic, car ils ne fonctionnent pas sur des impulsions de faible amplitude. Le silencieux de Moscou WB-1. Image via les forums QRZ
Le problème avec la suppression du signal du Woodpecker était qu'il avait une large bande passante et des impulsions incohérentes. La réflexion ionosphérique étirait les impulsions et créerait parfois des échos, la transformant en un jeu de coup de taupe. Pour aggraver les choses, ils ressemblaient souvent à des signaux réguliers, ce qui rendait encore plus difficile d'isoler le pic du bois quel que soit le signal souhaité. Le Blanker Datong SRB2 Woodpecker. Image via Radioworld
Un appareil populaire était l'AEA Moscow Muffler (PDF), qui fonctionnait en générant un signal interne de 10 ou 16 Hz pour masquer le pic. Mais si l’ionosphère étirait les impulsions, la largeur d’impulsion du blanker devait être augmentée pour compenser, ce qui signifiait souvent perdre le signal souhaité dans le shuffle.
Un autre appareil, le Datong SRB2, était beaucoup plus une affaire de set-it-and-forget-it (PDF, page 39). Le SRB2 fonctionnait un peu comme le silencieux de Moscou, en générant une horloge interne et en la comparant au signal Woodpecker.
La chose intéressante à propos du SRB2 est qu'il était automatique. Une fois qu'il a trouvé une correspondance, il a adapté l'impulsion de blocage pour l'adapter en composant la largeur d'impulsion, le nombre d'impulsions de suppression et leurs positions idéales. À l'inverse, le silencieux de Moscou utilisait des impulsions à largeur fixe, vous deviez donc continuer à jouer avec afin de garder le signal masqué.
Toujours debout, silencieux
L'ingérence du pic russe a cessé après la chute de l'Union soviétique en 1989, époque à laquelle son existence a finalement été confirmée par le gouvernement soviétique. À ce moment-là, les Russes étaient passés aux satellites pour leurs besoins d'alerte précoce.
En 2013, un signal similaire a commencé à terroriser les ondes courtes, mais pas aussi fortement que l'original. On pense qu'il provient d'un nouveau système radar russe OTH appelé Container, qui semble presque aussi gros que Duga. Si vous voulez le vérifier, syntonisez 14.270 sur ondes courtes et dites-nous ce que vous entendez!
[Source d'image principale: l'antenne radar Duga, Image de Corsairoz CC BY-SA 4.0]
Un contact est prévu avec le Lycée Jean Moulin, Les Andelys, France,
téléobjectif multipoint via NA7V
L'indicatif d'appel de l'ISS est actuellement programmé pour être NA1SS
Thomas Pesquet KG5FYG assura la liaison
Le contact est prévue pour: jeu.2021-05-20 08:38:15 UTC 10h38 Loc 88 deg
Les amateurs et autres personnes du monde entier peuvent écouter les contacts entre amateurs opérant dans les écoles et permettant aux étudiants d'interagir avec des astronautes et des cosmonautes à bord de la Station spatiale internationale.
La fréquence de liaison descendante sur laquelle écouter est de 145,800 MHz dans le monde.
La Raspberry Pi PICO est l'une des dernières cartes de développement développées par la fondation Raspberry Pi. elle est petite compacte et prend en charge C / C ++ et micro python.Dans ce tutoriel, nous allons apprendre à utiliser Raspberry Pi PICO avec Thonny IDE.Raspberry Pi PICO est l'une des cartes de développement supportées par micro python les moins chères.
IDE Thonny Python
Il s'agit d'un IDE Python pour les débutants qui est simple à utiliser.
Thonny est livré avec Python 3.7 intégré, vous n'avez donc pas besoin d'installer python séparément.
Installez simplement Thonny et vous êtes prêt à apprendre la programmation. (Vous pouvez également utiliser une installation Python distincte, si nécessaire.)
L'interface utilisateur initiale est dépouillée de toutes les fonctionnalités susceptibles de distraire les débutants.
Vous pouvez télécharger la dernière version à partir du lien ci-dessous.
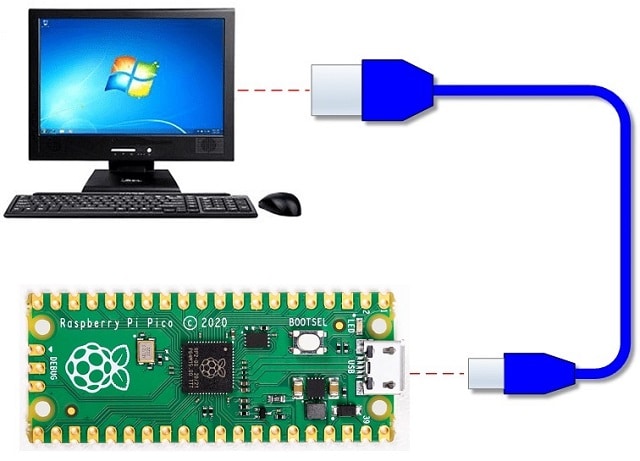
Une fois que vous avez installé Thonny IDE, il n'est plus temps de connecter votre Raspberry Pi PICO à votre ordinateur à l'aide d'un câble de données.
Configuration initiale
Avant de commencer à télécharger le code, vous devez installer le micrologiciel micro python. Suivez ces étapes pour installer le micrologiciel.
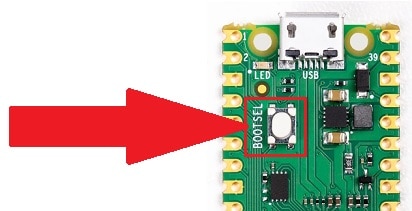
Appuyez sur le bouton BOOTSEL et connectez-le à votre ordinateur à l'aide d'un câble de données USN vers micro USB.
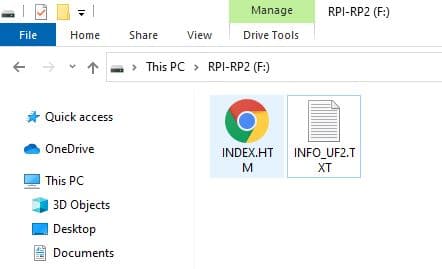
Une fois connecté, cela affichera votre Raspberry Pi Pico en tant que périphérique de stockage de masse USB avec deux fichiers. Il a un stockage de 128 Mo.
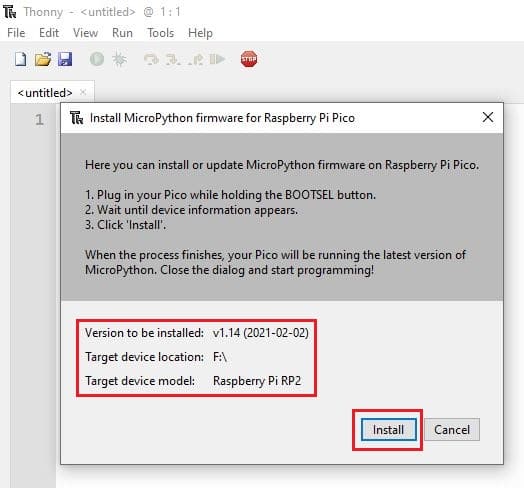
Vous pouvez maintenant ouvrir Thonny IDE et il y aura une fenêtre contextuelle comme indiqué ci-dessous. Cette fenêtre contextuelle affichera des informations concernant Pi PICO. Cliquez simplement sur Installer pour installer le micrologiciel micro python.
Raspberry Pi PICO avec Thonny IDE
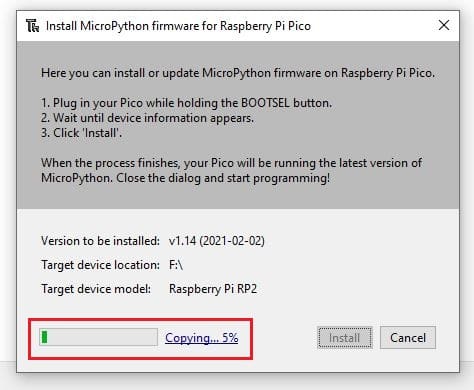
Une fois que vous cliquez sur installer, vous verrez la barre de progression indiquant la progression de l'installation.
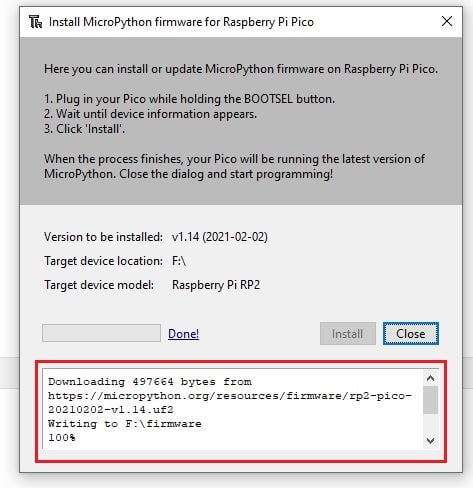
Une fois l'installation terminée, vous pouvez cliquer sur Terminé pour voir les détails téléchargés. Cette étape est facultative.
Raspberry Pi PICO avec Thonny IDE
Enfin, votre Raspberry Pi Pico est mis à jour avec le micrologiciel micro Python et prêt à exécuter des codes python.